Optional APEX motion feature API for the ICM-42670-P. More...
#include "ICM42670_driver.h"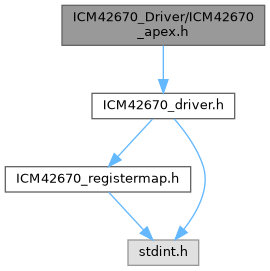
Go to the source code of this file.
Data Structures | |
| struct | ICM42670_PedoConfig_t |
| Pedometer configuration. More... | |
| struct | ICM42670_PedoData_t |
| Pedometer output data. More... | |
| struct | ICM42670_TiltConfig_t |
| Tilt detection configuration. More... | |
| struct | ICM42670_LowGConfig_t |
| Low-g detection configuration. More... | |
| struct | ICM42670_FreeFallConfig_t |
| Freefall detection configuration. More... | |
| struct | ICM42670_FreeFallData_t |
| Freefall output data. More... | |
| struct | ICM42670_WakeOnMotionConfig_t |
| Wake-on-motion threshold configuration. More... | |
| struct | ICM42670_WakeOnMotionData_t |
| Wake-on-motion output flags. More... | |
| struct | ICM42670_SignificantMotionConfig_t |
| Significant-motion sensitivity configuration. More... | |
| struct | ICM42670_ApexData_t |
| Combined APEX snapshot data. More... | |
Enumerations | |
| enum | ICM42670_ApexActivity_t { ICM42670_APEX_ACTIVITY_UNKNOWN = 0U , ICM42670_APEX_ACTIVITY_WALK = 1U , ICM42670_APEX_ACTIVITY_RUN = 2U } |
| Pedometer activity classification. | |
Functions | |
| ICM42670_Status_t | ICM42670_Init_Apex (const ICM42670_Config *config) |
| Initialize the APEX DMP block before enabling tilt/pedometer features. | |
| ICM42670_Status_t | ICM42670_Enable_Pedo (const ICM42670_Config *config, const ICM42670_PedoConfig_t *pedo_config) |
| Pedometer tracks step count and issues a step detect interrupt. | |
| ICM42670_Status_t | ICM42670_Disable_Pedo (const ICM42670_Config *config) |
| Disable pedometer reporting. | |
| ICM42670_Status_t | ICM42670_Read_Pedo (const ICM42670_Config *config, ICM42670_PedoData_t *pedo_data) |
| Read pedometer data and read-clear step status flags. | |
| ICM42670_Status_t | ICM42670_Enable_Tilt (const ICM42670_Config *config, const ICM42670_TiltConfig_t *tilt_config) |
| Tilt detection issues an interrupt when the tilt angle exceeds 35 degrees for more than a programmable time. | |
| ICM42670_Status_t | ICM42670_Disable_Tilt (const ICM42670_Config *config) |
| Disable tilt detection. | |
| ICM42670_Status_t | ICM42670_Read_Tilt (const ICM42670_Config *config, uint8_t *tilt_detected) |
| Read and clear the tilt event flag. | |
| ICM42670_Status_t | ICM42670_Enable_Low_G (const ICM42670_Config *config, const ICM42670_LowGConfig_t *low_g_config) |
| Low-g detection triggers an interrupt when the absolute value of the accelerometer combined axis falls below a programmable threshold and stays below the threshold for a programmable time. | |
| ICM42670_Status_t | ICM42670_Disable_Low_G (const ICM42670_Config *config) |
| Disable low-g detection. | |
| ICM42670_Status_t | ICM42670_Read_Low_G (const ICM42670_Config *config, uint8_t *low_g_detected) |
| Read and clear the low-g event flag. | |
| ICM42670_Status_t | ICM42670_Enable_Free_Fall (const ICM42670_Config *config, const ICM42670_FreeFallConfig_t *free_fall_config) |
| Freefall detection triggers an interrupt when device freefall is detected and outputs freefall duration. | |
| ICM42670_Status_t | ICM42670_Disable_Free_Fall (const ICM42670_Config *config) |
| Disable freefall detection. | |
| ICM42670_Status_t | ICM42670_Read_Free_Fall (const ICM42670_Config *config, ICM42670_FreeFallData_t *free_fall_data) |
| Read freefall data and read-clear the freefall event flag. | |
| ICM42670_Status_t | ICM42670_Enable_Wake_On_Motion (const ICM42670_Config *config, const ICM42670_WakeOnMotionConfig_t *wake_on_motion_config) |
| Wake on Motion detects motion when accelerometer samples exceed a programmable threshold. This motion event can be used to enable device operation from sleep mode. | |
| ICM42670_Status_t | ICM42670_Disable_Wake_On_Motion (const ICM42670_Config *config) |
| Disable wake-on-motion detection. | |
| ICM42670_Status_t | ICM42670_Read_Wake_On_Motion (const ICM42670_Config *config, ICM42670_WakeOnMotionData_t *wake_on_motion_data) |
| Read and clear wake-on-motion axis flags. | |
| ICM42670_Status_t | ICM42670_Enable_Significant_Motion (const ICM42670_Config *config, const ICM42670_SignificantMotionConfig_t *significant_motion_config) |
| Significant Motion Detector detects significant motion based on accelerometer data. | |
| ICM42670_Status_t | ICM42670_Disable_Significant_Motion (const ICM42670_Config *config) |
| Disable significant-motion detection. | |
| ICM42670_Status_t | ICM42670_Read_Significant_Motion (const ICM42670_Config *config, uint8_t *significant_motion_detected) |
| Read and clear the significant-motion event flag. | |
| ICM42670_Status_t | ICM42670_Read_Apex (const ICM42670_Config *config, ICM42670_ApexData_t *apex_data) |
| Read a combined APEX data snapshot. | |
Detailed Description
Optional APEX motion feature API for the ICM-42670-P.
APEX features use the device's internal DMP. Call ICM42670_Init_Apex() before enabling pedometer, tilt, low-g, freefall, wake-on-motion, or significant-motion features.
Function Documentation
◆ ICM42670_Disable_Free_Fall()
| ICM42670_Status_t ICM42670_Disable_Free_Fall | ( | const ICM42670_Config * | config | ) |
Disable freefall detection.
- Parameters
-
config Driver configuration with read and write callbacks.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
◆ ICM42670_Disable_Low_G()
| ICM42670_Status_t ICM42670_Disable_Low_G | ( | const ICM42670_Config * | config | ) |
Disable low-g detection.
- Parameters
-
config Driver configuration with read and write callbacks.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
◆ ICM42670_Disable_Pedo()
| ICM42670_Status_t ICM42670_Disable_Pedo | ( | const ICM42670_Config * | config | ) |
Disable pedometer reporting.
- Parameters
-
config Driver configuration with read and write callbacks.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
◆ ICM42670_Disable_Significant_Motion()
| ICM42670_Status_t ICM42670_Disable_Significant_Motion | ( | const ICM42670_Config * | config | ) |
Disable significant-motion detection.
- Parameters
-
config Driver configuration with read and write callbacks.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
◆ ICM42670_Disable_Tilt()
| ICM42670_Status_t ICM42670_Disable_Tilt | ( | const ICM42670_Config * | config | ) |
Disable tilt detection.
- Parameters
-
config Driver configuration with read and write callbacks.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
◆ ICM42670_Disable_Wake_On_Motion()
| ICM42670_Status_t ICM42670_Disable_Wake_On_Motion | ( | const ICM42670_Config * | config | ) |
Disable wake-on-motion detection.
- Parameters
-
config Driver configuration with read and write callbacks.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
◆ ICM42670_Enable_Free_Fall()
| ICM42670_Status_t ICM42670_Enable_Free_Fall | ( | const ICM42670_Config * | config, |
| const ICM42670_FreeFallConfig_t * | free_fall_config | ||
| ) |
Freefall detection triggers an interrupt when device freefall is detected and outputs freefall duration.
- Parameters
-
config Driver configuration with read and write callbacks. free_fall_config Freefall setup values.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR or ICM42670_BUSY.
References ICM42670_FreeFallConfig_t::debounce_ms, ICM42670_ERROR, ICM42670_OK, ICM42670_FreeFallConfig_t::max_distance_cm, and ICM42670_FreeFallConfig_t::min_distance_cm.
◆ ICM42670_Enable_Low_G()
| ICM42670_Status_t ICM42670_Enable_Low_G | ( | const ICM42670_Config * | config, |
| const ICM42670_LowGConfig_t * | low_g_config | ||
| ) |
Low-g detection triggers an interrupt when the absolute value of the accelerometer combined axis falls below a programmable threshold and stays below the threshold for a programmable time.
- Parameters
-
config Driver configuration with read and write callbacks. low_g_config Low-g setup values.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR or ICM42670_BUSY.
References ICM42670_ERROR, ICM42670_OK, ICM42670_LowGConfig_t::sample_count, and ICM42670_LowGConfig_t::threshold_mg.
◆ ICM42670_Enable_Pedo()
| ICM42670_Status_t ICM42670_Enable_Pedo | ( | const ICM42670_Config * | config, |
| const ICM42670_PedoConfig_t * | pedo_config | ||
| ) |
Pedometer tracks step count and issues a step detect interrupt.
- Parameters
-
config Driver configuration with read and write callbacks. pedo_config Pedometer setup values.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR or ICM42670_BUSY.
References ICM42670_ERROR, ICM42670_OK, and ICM42670_PedoConfig_t::slow_walk_enable.
◆ ICM42670_Enable_Significant_Motion()
| ICM42670_Status_t ICM42670_Enable_Significant_Motion | ( | const ICM42670_Config * | config, |
| const ICM42670_SignificantMotionConfig_t * | significant_motion_config | ||
| ) |
Significant Motion Detector detects significant motion based on accelerometer data.
- Parameters
-
config Driver configuration with read and write callbacks. significant_motion_config Significant-motion setup values.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR or ICM42670_BUSY.
References ICM42670_ERROR, ICM42670_OK, and ICM42670_SignificantMotionConfig_t::sensitivity_level.
◆ ICM42670_Enable_Tilt()
| ICM42670_Status_t ICM42670_Enable_Tilt | ( | const ICM42670_Config * | config, |
| const ICM42670_TiltConfig_t * | tilt_config | ||
| ) |
Tilt detection issues an interrupt when the tilt angle exceeds 35 degrees for more than a programmable time.
- Parameters
-
config Driver configuration with read and write callbacks. tilt_config Tilt setup values.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR or ICM42670_BUSY.
References ICM42670_ERROR, ICM42670_OK, and ICM42670_TiltConfig_t::wait_time_s.
◆ ICM42670_Enable_Wake_On_Motion()
| ICM42670_Status_t ICM42670_Enable_Wake_On_Motion | ( | const ICM42670_Config * | config, |
| const ICM42670_WakeOnMotionConfig_t * | wake_on_motion_config | ||
| ) |
Wake on Motion detects motion when accelerometer samples exceed a programmable threshold. This motion event can be used to enable device operation from sleep mode.
- Parameters
-
config Driver configuration with read and write callbacks. wake_on_motion_config Wake-on-motion threshold setup.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR or ICM42670_BUSY.
References ICM42670_ERROR, ICM42670_OK, ICM42670_WakeOnMotionConfig_t::x_threshold_mg, ICM42670_WakeOnMotionConfig_t::y_threshold_mg, and ICM42670_WakeOnMotionConfig_t::z_threshold_mg.
◆ ICM42670_Init_Apex()
| ICM42670_Status_t ICM42670_Init_Apex | ( | const ICM42670_Config * | config | ) |
Initialize the APEX DMP block before enabling tilt/pedometer features.
This sets DMP_ODR to 50 Hz, disables DMP power-save for direct polling use, resets APEX memory, and runs the DMP initialization command.
- Parameters
-
config Driver configuration with read, write, and delay callbacks.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR or ICM42670_BUSY.
References ICM42670_Config::delay_ms, ICM42670_ERROR, and ICM42670_OK.
◆ ICM42670_Read_Apex()
| ICM42670_Status_t ICM42670_Read_Apex | ( | const ICM42670_Config * | config, |
| ICM42670_ApexData_t * | apex_data | ||
| ) |
Read a combined APEX data snapshot.
This is the preferred read path when multiple APEX features are enabled, because INT_STATUS2 and INT_STATUS3 are read-clear.
- Parameters
-
config Driver configuration with a read callback. apex_data Destination for combined APEX data.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
References ICM42670_PedoData_t::activity, ICM42670_PedoData_t::cadence_raw, ICM42670_FreeFallData_t::detected, ICM42670_FreeFallData_t::duration_samples, ICM42670_ApexData_t::free_fall, ICM42670_ERROR, ICM42670_OK, ICM42670_ApexData_t::low_g_detected, ICM42670_PedoData_t::overflow, ICM42670_ApexData_t::pedo, ICM42670_ApexData_t::significant_motion_detected, ICM42670_PedoData_t::step_count, ICM42670_PedoData_t::step_detected, ICM42670_ApexData_t::tilt_detected, ICM42670_ApexData_t::wake_on_motion, ICM42670_WakeOnMotionData_t::x_detected, ICM42670_WakeOnMotionData_t::y_detected, and ICM42670_WakeOnMotionData_t::z_detected.
◆ ICM42670_Read_Free_Fall()
| ICM42670_Status_t ICM42670_Read_Free_Fall | ( | const ICM42670_Config * | config, |
| ICM42670_FreeFallData_t * | free_fall_data | ||
| ) |
Read freefall data and read-clear the freefall event flag.
- Parameters
-
config Driver configuration with a read callback. free_fall_data Destination for freefall data.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
References ICM42670_FreeFallData_t::detected, ICM42670_FreeFallData_t::duration_samples, ICM42670_ERROR, and ICM42670_OK.
◆ ICM42670_Read_Low_G()
| ICM42670_Status_t ICM42670_Read_Low_G | ( | const ICM42670_Config * | config, |
| uint8_t * | low_g_detected | ||
| ) |
Read and clear the low-g event flag.
- Parameters
-
config Driver configuration with a read callback. low_g_detected Destination flag, nonzero when low-g was reported.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
References ICM42670_ERROR, and ICM42670_OK.
◆ ICM42670_Read_Pedo()
| ICM42670_Status_t ICM42670_Read_Pedo | ( | const ICM42670_Config * | config, |
| ICM42670_PedoData_t * | pedo_data | ||
| ) |
Read pedometer data and read-clear step status flags.
- Parameters
-
config Driver configuration with a read callback. pedo_data Destination for pedometer data.
- Returns
- ICM42670_OK on success, ICM42670_BUSY if data is invalid, otherwise ICM42670_ERROR.
References ICM42670_PedoData_t::activity, ICM42670_PedoData_t::cadence_raw, ICM42670_BUSY, ICM42670_ERROR, ICM42670_OK, ICM42670_PedoData_t::overflow, ICM42670_PedoData_t::step_count, and ICM42670_PedoData_t::step_detected.
◆ ICM42670_Read_Significant_Motion()
| ICM42670_Status_t ICM42670_Read_Significant_Motion | ( | const ICM42670_Config * | config, |
| uint8_t * | significant_motion_detected | ||
| ) |
Read and clear the significant-motion event flag.
- Parameters
-
config Driver configuration with a read callback. significant_motion_detected Destination flag, nonzero when reported.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
References ICM42670_ERROR, and ICM42670_OK.
◆ ICM42670_Read_Tilt()
| ICM42670_Status_t ICM42670_Read_Tilt | ( | const ICM42670_Config * | config, |
| uint8_t * | tilt_detected | ||
| ) |
Read and clear the tilt event flag.
- Parameters
-
config Driver configuration with a read callback. tilt_detected Destination flag, nonzero when tilt was reported.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
References ICM42670_ERROR, and ICM42670_OK.
◆ ICM42670_Read_Wake_On_Motion()
| ICM42670_Status_t ICM42670_Read_Wake_On_Motion | ( | const ICM42670_Config * | config, |
| ICM42670_WakeOnMotionData_t * | wake_on_motion_data | ||
| ) |
Read and clear wake-on-motion axis flags.
- Parameters
-
config Driver configuration with a read callback. wake_on_motion_data Destination for axis flags.
- Returns
- ICM42670_OK on success, otherwise ICM42670_ERROR.
References ICM42670_ERROR, ICM42670_OK, ICM42670_WakeOnMotionData_t::x_detected, ICM42670_WakeOnMotionData_t::y_detected, and ICM42670_WakeOnMotionData_t::z_detected.